Inject a running robotframework process
- 1. Inject to the running robot process
- 2. First try - print some message on terminal
- 3. Interact with robot EXECUTION_CONTEXT
Robotframework is a widely used ATDD framework. Sometime the test suite become very large and complicated. In my company, some suites contain thousands of execution steps and last over 12 hours. I was always questioned on such scenario:
Hi Zhang, could you help me? My robot hung for several hours, could you tell me what it is doing?
or
Hi, there is a very very long execution case that already run for 12 hours, but just now I find one variable in teardown was set incorrectly, I don’t want to rerun the whole suite, could you help me?
These requirements were hard to met, as I had no interfaces to interract with the running robot process.
Fortunatelly we have pyrasite. A tool that can inject code into running python process. If you still do not how it work, take some minutes to watch the video on its homepage.
Install pyrasite is a piece of cake pip install pyrasite.
To use pyrasite, you should enable ptrace first.
sudo echo 0 | sudo tee /proc/sys/kernel/yama/ptrace_scope
Let’s write a simple test suite as a demo.
*** Settings ***
*** Test Cases ***
Test One
${testvar} Set Variable 0
Log Before Sleep
Sleep 60s
Log ${testvar}
1. Inject to the running robot process
- Run the suite with
pybotcommand - Detect the process id with some command like
ps ax | grep robot - Open a terminal, and execute
pyrasite-shell <pid>, now it will open a shell, on that shell, you can inject code into running robot process
2. First try - print some message on terminal
Let’s verify if our injection can work or not. On pyrasite-shell, let’s input:
import sys
sys.__stderr__.write('hello, you are injected!\n')
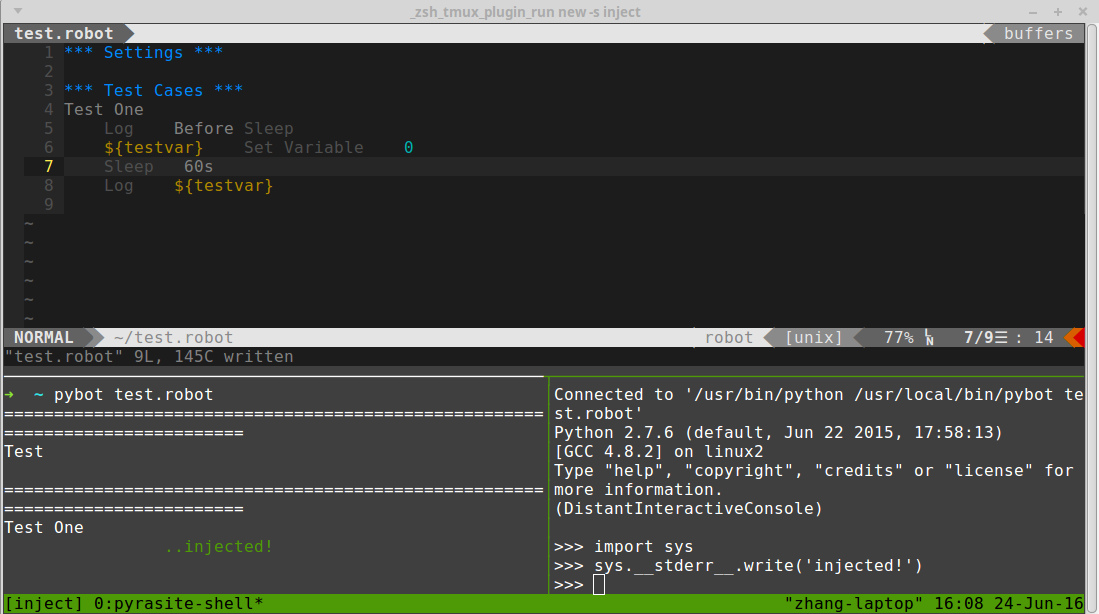
In this example, we use
sys.__stderr__instead ofsys.stderras robotframework will override the defaultsys.stderrandsys.stdout
3. Interact with robot EXECUTION_CONTEXT
Robotframework does not provide public API to interract with its context, but the interface robot.running.EXECUTION_CONTEXTS can be used too (at least from version 2.7 to 3.0).
Let’s see how to use this interface to get the running variables right now.
Still in pyrasite-shell:
from robot.running import EXECUTION_CONTEXTS
ctx = EXECUTION_CONTEXTS.current
print ctx.variables.as_dict()
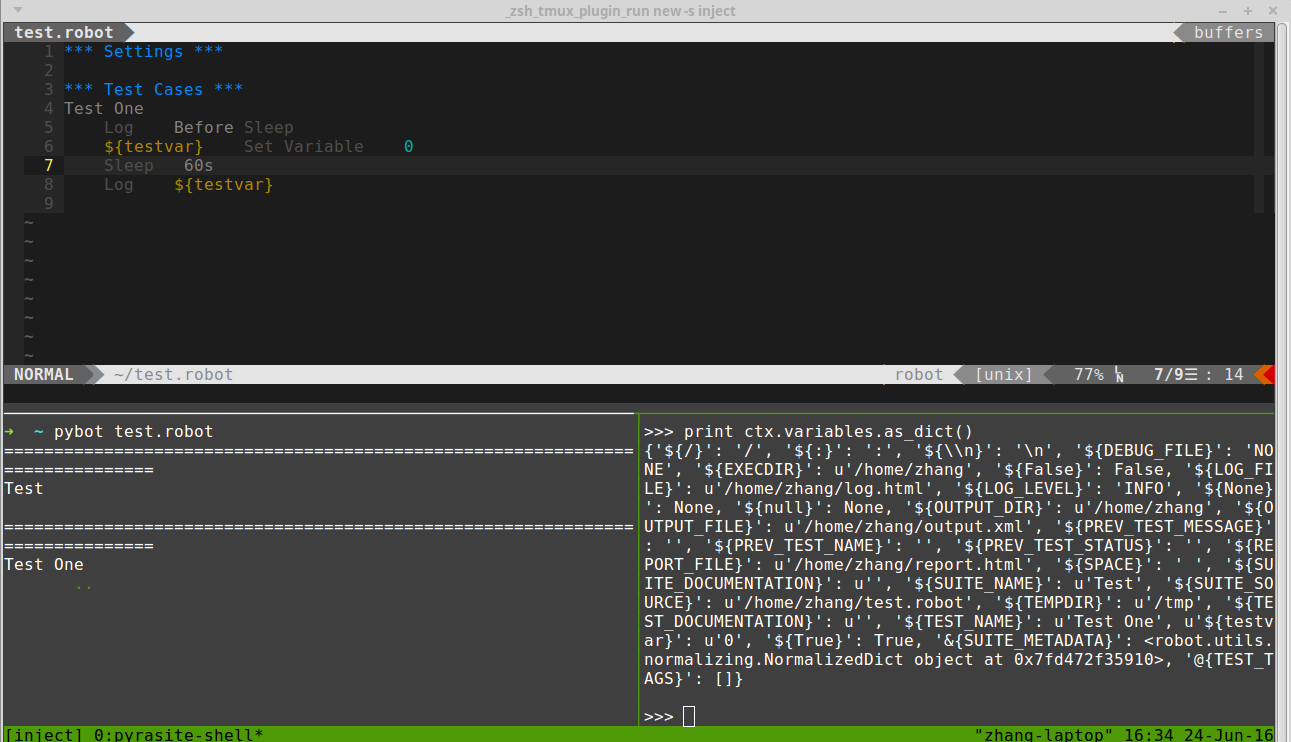
We get all the variables in this scope, usually from the variables, we can guess which step it is right now.
And we are not only able to view the data, but also modify and update. For example, we can update the value of one variable.
ctx.variables.set_keyword('${testvar}', '1')
Or insert a step.
from robot.running import Keyword
Keyword(name='Log', args=('inserted step', )).run(ctx)
Read pyrasite document and the code of RobotFramework to find more usage.